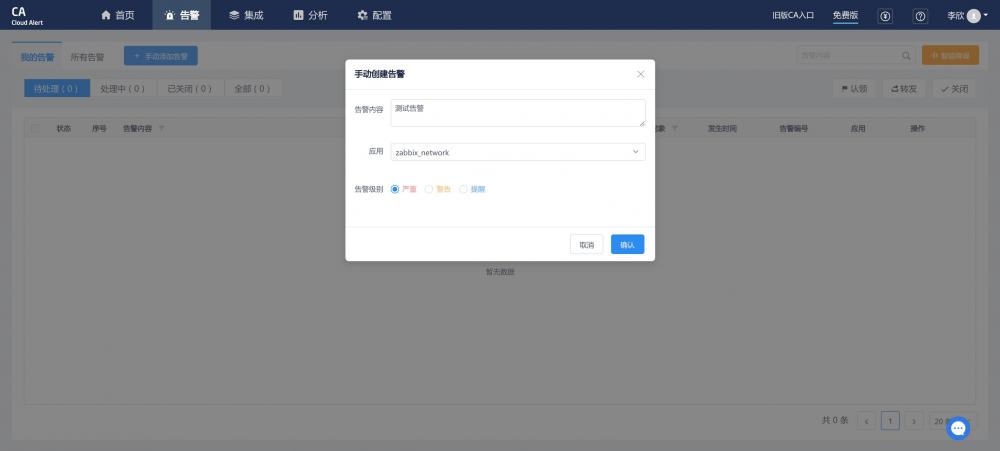
如何在智能告警平台CA触发测试告警
1614
2022-08-25
如何实现ABB机器人和视觉系统进行通讯详细教程和方法说明(abb机器人plc交互信号)
如何实现ABB机器人和视觉系统间的TCP/IP通讯呢?首先我们先看下通讯效果,然后我们再来解开通讯背后的秘密。
ABB机器人实现TCP/IP通讯的前提是必须要有616-1 PC Interface选项功能,如下图是ABB官方对于PCInterface选项功能的介绍:
所以,当我们在真实机器人系统上想实现TCP/IP通讯要先检查下系统是否含此选项功能,参考如下界面:
TCP是因特网中的传输层协议,使用三次握手协议建立连接,过程比较复杂,实际使用中,我们可以用socket编程接口实现服务器与客户端间的通讯,关于TCP/IP与socket之间的关系大家可以查阅相关资料,下图是ABB机器人使用socket接口实现通信的过程。
下面我们在RobotStudio软件中模拟机器人实现此功能的过程(这里我们把机器人作为客户端client使用):
第一步,创建机器人系统,这里要注意参考图片把PCInterface选项加入。
第二步,新建程序模块及例行程序。
通讯相关指令在Communicate指令集下。
第三步,编写程序,具体程序如下:
SocketCreate socket_vision;
!创建套接字,用于连接远程计算机,这里注意,下面编程是把机器人作为客户端,远程计算机作为服务器的
SocketConnect socket_vision,“127.0.0.1”,5001;
!连接远程计算机,这里要写明远程计算机的IP地址和通讯双方共用的端口号。注意,在真实机器人系统上,远程计算机网口和机器人LAN口或WAN口间要用网线做好连接,并将计算机IP地址设置和机器人IP地址同一网段,此外,端口号不可随意设置,一般不会用0~1023之间的数字。这里为了和本机上TCP/IP测试工具间实现通讯,IP地址设为回送地址 “127.0.0.1”
SocketSend socket_visionStr:="hello!";
!向远程计算机发送信息,发送内容可以为具体字符串,也可以是string型变量
SocketReceive socket_visionStr:=string_vision;
!接收来自远程计算机发送过来的数据,存储在string_vision变量中,注意,string_vision存储类型必须为变量,数据类型为string
SocketClose socket_vision;
发表评论
暂时没有评论,来抢沙发吧~